Guides
September 21, 2022
How to Build a Faster Vision Transformer for Supervised Image Classification
Learn how to implement a vision transformer in Python and speed up its operations by adding a TokenLearner layer.

Mehreen Saeed
In their seminal paper “Attention Is All You Need,” Ashish Vaswani and colleagues proposed the transformer architecture solely based on the attention mechanism. Engineers have successfully applied this model to implement many natural language processing tasks. Later in 2021, Alexey Dosovitskiy and his co-authors showed how to modify the transformer architecture to solve problems in the computer vision domain. The only addition to the pure transformer is an added layer that breaks up an image into smaller image patches that act like tokens.
The resulting model, called a “vision transformer” (ViT), works well for image data. However, the training phase of ViTs involves many operations and can be pretty slow. Michael Ryoo and his colleagues showed one possible method of speeding up the computations of the training stage by adding a token learning layer called TokenLearner to the network.
In an earlier tutorial, I showed how to build a transformer for supervised classification of text documents. This time, I’ll modify this model to build a ViT and use it to classify images. As a second step, I’ll show you how to add a token learning layer to the transformer model to create a faster ViT model.
My goal is to show you how the ViT works and how the token learner improves its performance. I’ll keep everything simple; you won’t see any fancy preprocessing or sophisticated fine-tuning of the model to beat the accuracy of existing systems.
Prerequisites
Before we get started, be aware that you’ll need some background knowledge to understand this tutorial. If you are at a beginning stage, I suggest you first read through these articles, in sequence:
The Overall ViT Architecture
The ViT you are about to build has the structure shown in Figure 1. After tokenizing the image, the transformer passes the token images through an embedding layer, followed by four encoder layers. The output from the last encoder layer is input to a global average pooling layer and then passed through a feedforward neural network.
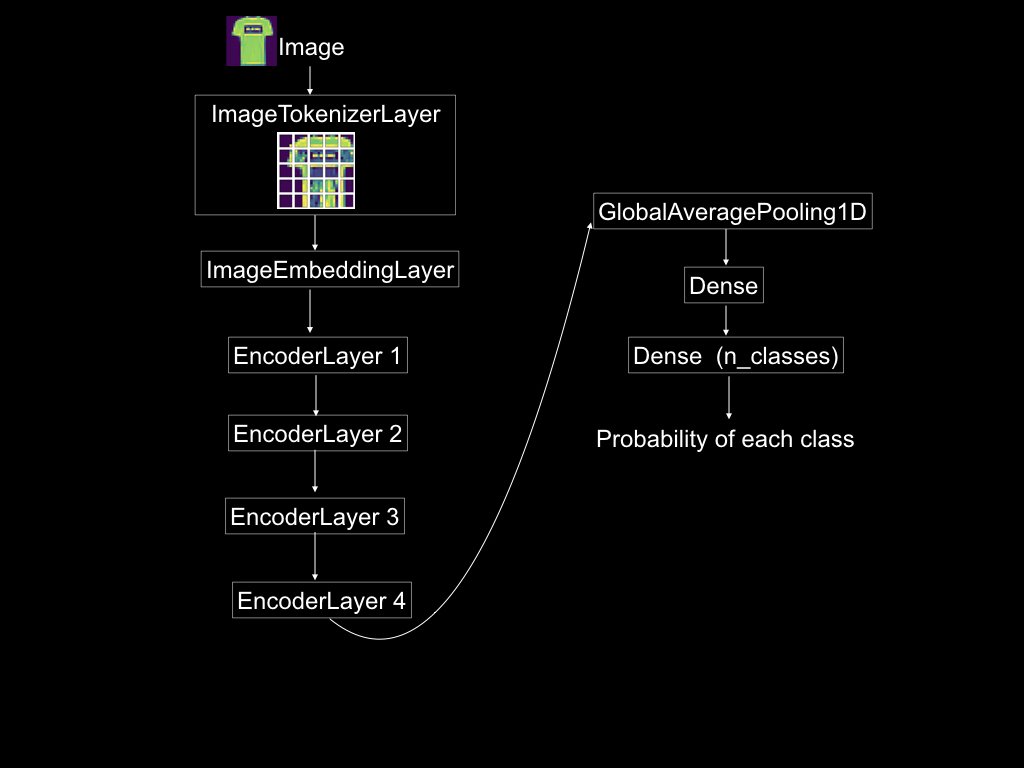
Figure 1: The vision transformer architecture. Source: Mehreen Saeed
The Import Section
As a first step, import the following libraries:
# Different layersfrom tensorflow.keras.layers import MultiHeadAttention, Input, Dense, Reshapefrom tensorflow.keras.layers import LayerNormalization, Layerfrom tensorflow.keras.layers import Embedding, GlobalAveragePooling1Dfrom tensorflow.keras.layers import Conv2D, Dropout# For miscellaneous functionsfrom tensorflow.keras.datasets import fashion_mnistfrom tensorflow import reduce_mean, float32, range, reshapefrom tensorflow.keras import utilsfrom tensorflow.keras.metrics import TopKCategoricalAccuracyfrom tensorflow.nn import gelufrom tensorflow.keras import Model, Sequential# For tokenizationfrom tensorflow.image import extract_patches
# For math/arraysimport numpy as np# For plottingimport matplotlib.pyplot as plt# For profilingimport timeLoad the Dataset
We’ll use the Fashion-MNIST dataset, which consists of 28-by-28 grayscale images of different fashion items. In the code below, I have set n_classes to four so that you can run this code quickly on four classes. Change this value to 10 to run the example on the entire dataset.
The following code reads the dataset and prints some statistics.
(train_X, train_Y), (test_X, test_Y) = fashion_mnist.load_data()input_shape = train_X[0].shapeDownloading data from https://storage.googleapis.com/tensorflow/tf-keras-datasets/train-labels-idx1-ubyte.gz32768/29515 [=================================] - 0s 0us/step40960/29515 [=========================================] - 0s 0us/stepDownloading data from https://storage.googleapis.com/tensorflow/tf-keras-datasets/train-images-idx3-ubyte.gz26427392/26421880 [==============================] - 0s 0us/step26435584/26421880 [==============================] - 0s 0us/stepDownloading data from https://storage.googleapis.com/tensorflow/tf-keras-datasets/t10k-labels-idx1-ubyte.gz16384/5148 [===============================================================================================] - 0s 0us/stepDownloading data from https://storage.googleapis.com/tensorflow/tf-keras-datasets/t10k-images-idx3-ubyte.gz4423680/4422102 [==============================] - 0s 0us/step4431872/4422102 [==============================] - 0s 0us/stepn_classes = 4ind = np.where(train_Y<n_classes)[0]train_X = np.array(list(map(train_X.__getitem__, ind)))train_Y = np.array(list(map(train_Y.__getitem__, ind)))print('\n Training data shape:', train_X.shape, 'training labels shape:', train_Y.shape)
ind = np.where(test_Y<n_classes)[0]test_X = np.array(list(map(test_X.__getitem__, ind)))test_Y = np.array(list(map(test_Y.__getitem__, ind)))print('\n Test data shape:', test_X.shape, 'test labels shape:', test_Y.shape)# Convert labels to categorical labelstrain_Y_categorical = utils.to_categorical(train_Y)test_Y_categorical = utils.to_categorical(test_Y)
Training data shape: (24000, 28, 28) training labels shape: (24000,)Test data shape: (4000, 28, 28) test labels shape: (4000,)As these images are grayscale, but you can reshape them to a 3D array with one color channel. This way, this code will work for RGB images as well.
# Reshape gray scale so that the model works with RGB images as wellif (len(train_X.shape) == 3):train_X = np.reshape(train_X, (train_X.shape[0], train_X.shape[1], train_X.shape[2], 1)).astype('float32')test_X = np.reshape(test_X, (test_X.shape[0], test_X.shape[1], test_X.shape[2], 1)).astype('float32')The Image Tokenizer Layer
For image data, the key is to understand what a token represents. One possibility is to let each pixel represent a token. However, this would not scale well with large image datasets. In the ViT architecture, Dosovitskiy and his colleagues used equal-sized patches of images to act as tokens. This sequence of tokens is then input to a traditional transformer with a minimal change to its architecture.
Fortunately, the TensorFlow library includes an extract_patches() method to break an image into smaller patches of fixed size. You can use this function to implement your own layer for tokenizing an image. In the code below, ImageTokenizerLayer is a custom class for tokenizing images. The call() method of this class creates the image patches and returns them.
class ImageTokenizerLayer(Layer):def __init__(self, token_shape):super(ImageTokenizerLayer, self).__init__()self.token_shape = token_shape
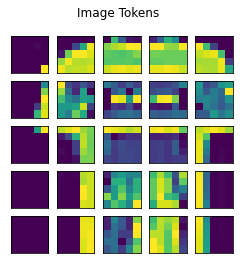
def call(self, images):tokens = extract_patches(images = images,sizes = [1, self.token_shape[0], self.token_shape[1], 1],strides = [1, self.token_shape[0], self.token_shape[1], 1],rates = [1, 1, 1, 1],padding = "VALID",)return tokensBecause the tokenization step is needed only once, you can store the tokens corresponding to the training set and use them as input to the ViT. In the code below, the dimensions of each token are the square root of the dimensions of the training and test images. However, you can change the patch size to a different value also. The two variables train_tokens and test_tokens store fixed-size tokens of each image. The tokens are also rendered below.
A few things to note:
- A single input image has 28 by 28 dimensions.
- The input image is broken into 25 tokens of size 5 by 5.
- Each 5-by-5 image token/patch is vectorized into a 1D array of size 25.
- In the tokenized training dataset, each image is split into a sequence of tokens. One image has 5-by-5-by-25 dimensional representation.
- n_rows and n_cols represent the total image tokens along the rows and columns, respectively. The total number of image tokens is, therefore, n_rows * n_cols.
def display_tokens(img, tokenized_img):# Check if RGB or grayscale imageif (img.shape[-1] == 3):img = img[:,:,:]else:img = img[:,:,0]plt.imshow(img.astype("uint8"))plt.title('Train Image')
fig, ax = plt.subplots(nrows=tokenized_img.shape[0],ncols=tokenized_img.shape[1],figsize=(4, 4),subplot_kw=dict(xticks=[], yticks=[]))for i in range(tokenized_img.shape[0]):for j in range(tokenized_img.shape[1]):# Check if it an RGB imageif (tokenized_img.shape[-1] == 3):token = np.reshape(tokenized_img[i, j, :], (token_dims[0], token_dims[1], 3))else:# Show graysclaetoken = np.reshape(tokenized_img[i, j, :], (token_dims[0], token_dims[1]))ax[i,j].imshow(token)plt.gcf().suptitle('Image Tokens')
fig, ax = plt.subplots(nrows=1,ncols=tokenized_img.shape[0]*tokenized_img.shape[1],figsize=(18, 2),subplot_kw=dict(xticks=[], yticks=[]))for i in range(tokenized_img.shape[0]):for j in range(tokenized_img.shape[1]):# Check if it an RGB imageif (tokenized_img.shape[-1] == 3):token = np.reshape(tokenized_img[i, j, :], (token_dims[0], token_dims[1], 3))else:# Show graysclaetoken = np.reshape(tokenized_img[i, j, :], (token_dims[0], token_dims[1]))ax[i*tokenized_img.shape[1] + j].imshow(token)plt.gcf().suptitle('Sequence of image tokens')plt.show()# Take the square root of dimensions of the input imagetoken_dims = np.round(np.sqrt(train_X[0].shape)).astype("uint8")train_tokens = ImageTokenizerLayer(token_dims)(train_X)test_tokens = ImageTokenizerLayer(token_dims)(test_X)n_rows=train_tokens.shape[1]n_cols=train_tokens.shape[2]print('Train data shape', train_X.shape)print('Train tokens shape', train_tokens.shape)# Display the original and image tokensdisplay_tokens(train_X[0], train_tokens[0])Train data shape (24000, 28, 28, 1)Train tokens shape (24000, 5, 5, 25)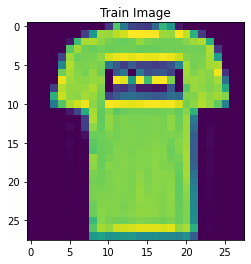

Writing a Customized Embedding Layer for the ViT
In a pure transformer architecture, all word tokens are encoded by summing their embeddings and their encoded positions. In the case of a ViT, the embedding layer projects an image linearly and sums it with its corresponding positional encoding. In this way, the positional encoding helps retain the order of a token in the sequence.
Below, you can see the implementation of a custom layer for encoding each image token. The call() method implements the following steps:
- Normalize the input image tokens.
- Project the normalized image tokens by using a Dense layer.
- Encode the positions using TensorFlow Embedding layer.
- Add the projections and the encoded positions. Return their sum.
Here, the length of the resulting embedding is stored in the variable embed_dim, whose value can be set by a user. Hence, the embedding layer produces an output of size total_tokens x embed_dim. Again, keep in mind that total_tokens = n_rows * ncols.
class ImageEmbeddingLayer(Layer):def __init__(self, output_dim):super(ImageEmbeddingLayer, self).__init__()self.output_dim = output_dim
# Need to define the Dense layer for linear projections # Embedding layer for positionsdef build(self, input_shape):self.total_img_tokens = input_shape[1]*input_shape[2]self.token_dims = input_shape[3]self.normalize_layer = LayerNormalization()self.dense = Dense(units=self.output_dim,input_shape=(None, self.token_dims))self.position_embedding = Embedding(input_dim=self.total_img_tokens,output_dim=self.output_dim)def call(self, input):img_tokens = reshape(input, [-1, self.total_img_tokens,self.token_dims])normalized_img_token = self.normalize_layer(img_tokens)img_projection = self.dense(normalized_img_token)all_positions = range(start=0, limit=self.total_img_tokens, delta=1)positions_encoding = self.position_embedding(all_positions)return positions_encoding + img_projectionThe Encoder Layer
In “How to Build a Transformer for Supervised Classification,” I showed you how to build a single encoder layer by sub-classing the Layer class. We’ll use the same implementation for the ViT. Just to recall, the encoder layer implements multihead attention followed by a feedforward network and a normalization layer.
class EncoderLayer(Layer):def __init__(self, total_heads, total_dense_units, embed_dim):super(EncoderLayer, self).__init__()# Multihead attention layerself.multihead = MultiHeadAttention(num_heads=total_heads, key_dim=embed_dim)# Feed forward network layerself.nnw = Sequential([Dense(total_dense_units, activation="relu"),Dense(embed_dim)])# Normalizationself.normalize_layer = LayerNormalization()def call(self, inputs):attn_output = self.multihead(inputs, inputs)normalize_attn = self.normalize_layer(inputs + attn_output)nnw_output = self.nnw(normalize_attn)final_output = self.normalize_layer(normalize_attn + nnw_output)return final_outputBuild the ViT
It’s time to construct the final ViT model from the ImageEmbeddingLayer and EncoderLayer. The final output of the transformer is produced by a softmax layer, where each unit of the layer corresponds to a category of the input image.
The code below constructs a ViT with four encoder layers followed by GlobalAveragePooling1D layer, an intermediate Dense layer, and the output Dense layer (refer to Figure 1).
# Set the hyperparametersEMBED_DIM = 128NUM_HEADS = 3TOTAL_DENSE = 100EPOCHS = 6FINAL_DENSE = 150DROPOUT = 0.5# Should return the modeldef build_vit(input_shape, embed_dim=EMBED_DIM, num_heads=NUM_HEADS, total_dense_units=TOTAL_DENSE):# Start connecting layersinputs = Input(shape=input_shape)embedding_layer = ImageEmbeddingLayer(embed_dim)(inputs)encoder_layer1 = EncoderLayer(num_heads, total_dense_units, embed_dim)(embedding_layer)encoder_layer2 = EncoderLayer(num_heads, total_dense_units, embed_dim)(encoder_layer1)encoder_layer3 = EncoderLayer(num_heads, total_dense_units, embed_dim)(encoder_layer2)encoder_layer4 = EncoderLayer(num_heads, total_dense_units, embed_dim)(encoder_layer3)pooling_layer = GlobalAveragePooling1D()(encoder_layer4)dense_layer = Dense(FINAL_DENSE, activation='relu')(pooling_layer)dropout_layer = Dropout(DROPOUT)(dense_layer)outputs = Dense(n_classes, activation="softmax")(dense_layer)# Construct the transformer modelViT = Model(inputs=inputs, outputs=outputs)ViT.compile(optimizer="adam", loss='categorical_crossentropy',metrics=['accuracy', 'Precision','Recall',TopKCategoricalAccuracy(5, name='top-5-accuracy')])return ViT
vit = build_vit(train_tokens[0].shape)Let’s look at the model summary.
vit.summary()Model: "model"_________________________________________________________________Layer (type) Output Shape Param #=================================================================input_1 (InputLayer) [(None, 5, 5, 25)] 0
image_embedding_layer (Imag (None, 25, 128) 6578eEmbeddingLayer)
encoder_layer (EncoderLayer (None, 25, 128) 223972)
encoder_layer_1 (EncoderLay (None, 25, 128) 223972er)
encoder_layer_2 (EncoderLay (None, 25, 128) 223972er)
encoder_layer_3 (EncoderLay (None, 25, 128) 223972er)
global_average_pooling1d (G (None, 128) 0lobalAveragePooling1D)
dense_8 (Dense) (None, 150) 19350
dense_9 (Dense) (None, 4) 604
=================================================================Total params: 922,420Trainable params: 922,420Non-trainable params: 0_________________________________________________________________Training the ViT
The code below trains the transformer model using a 33% split for the validation set.
start_time = time.time()history = vit.fit(train_tokens, train_Y_categorical,batch_size=32, epochs=EPOCHS, validation_split=0.33)end_time = time.time()print('\nViT training time: ', end_time-start_time)Epoch 1/6503/503 [==============================] - 110s 210ms/step - loss: 0.4088 - accuracy: 0.8528 - precision: 0.8704 - recall: 0.8325 - top-5-accuracy: 1.0000 - val_loss: 0.3440 - val_accuracy: 0.8826 - val_precision: 0.8926 - val_recall: 0.8717 - val_top-5-accuracy: 1.0000Epoch 2/6503/503 [==============================] - 104s 206ms/step - loss: 0.2743 - accuracy: 0.9077 - precision: 0.9177 - recall: 0.8979 - top-5-accuracy: 1.0000 - val_loss: 0.2683 - val_accuracy: 0.9097 - val_precision: 0.9237 - val_recall: 0.8962 - val_top-5-accuracy: 1.0000Epoch 3/6503/503 [==============================] - 104s 207ms/step - loss: 0.2652 - accuracy: 0.9092 - precision: 0.9204 - recall: 0.9005 - top-5-accuracy: 1.0000 - val_loss: 0.2399 - val_accuracy: 0.9166 - val_precision: 0.9278 - val_recall: 0.9078 - val_top-5-accuracy: 1.0000Epoch 4/6503/503 [==============================] - 103s 204ms/step - loss: 0.2918 - accuracy: 0.9027 - precision: 0.9143 - recall: 0.8914 - top-5-accuracy: 1.0000 - val_loss: 0.3244 - val_accuracy: 0.8929 - val_precision: 0.9031 - val_recall: 0.8833 - val_top-5-accuracy: 1.0000Epoch 5/6503/503 [==============================] - 106s 210ms/step - loss: 0.2998 - accuracy: 0.8973 - precision: 0.9095 - recall: 0.8856 - top-5-accuracy: 1.0000 - val_loss: 0.3078 - val_accuracy: 0.8883 - val_precision: 0.9016 - val_recall: 0.8759 - val_top-5-accuracy: 1.0000Epoch 6/6503/503 [==============================] - 103s 206ms/step - loss: 0.3092 - accuracy: 0.8973 - precision: 0.9098 - recall: 0.8850 - top-5-accuracy: 1.0000 - val_loss: 0.4423 - val_accuracy: 0.8418 - val_precision: 0.8583 - val_recall: 0.8233 - val_top-5-accuracy: 1.0000
ViT training time: 686.4262797832489View the Learning History
The history object stores the learning history of our model. The fit() method returns the following keys in the history.history object.
print('\nMetrics recorded during training', history.history.keys(), '\n')Metrics recorded during training dict_keys(['loss', 'accuracy', 'precision', 'recall', 'top-5-accuracy', 'val_loss', 'val_accuracy', 'val_precision', 'val_recall', 'val_top-5-accuracy'])Let’s visualize the learning history by plotting various metrics.
n_metrics = int(len(history.history.keys())/2)metrics = list(history.history.values())metric_names = list(history.history.keys())
fig = plt.figure(figsize=(18,4))for i in np.arange(n_metrics):fig.add_subplot(101 + n_metrics*10 +i)plt.plot(metrics[i])plt.plot(metrics[i+n_metrics])plt.legend(['Training', 'Validation'])plt.xlabel('Epoch Number')plt.ylabel(metric_names[i])
plt.gcf().suptitle('Learning History of the ViT')plt.subplots_adjust(wspace=0.4)plt.show()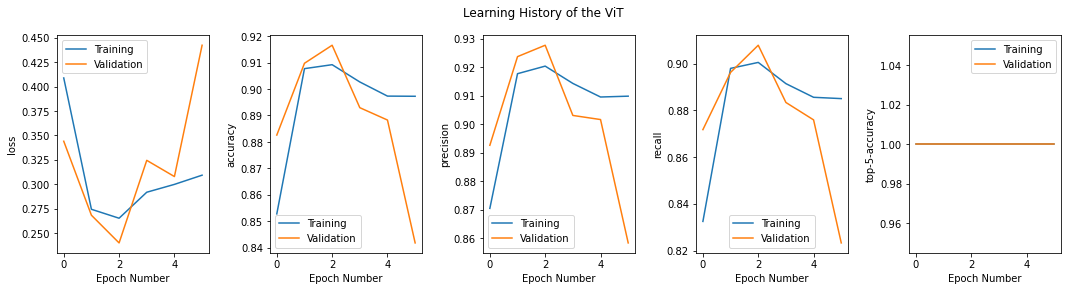
Evaluating the ViT’s Classification Performance
The evaluate() method returns all the metrics that you specified during the training stage.
train_metrics = vit.evaluate(train_tokens, train_Y_categorical)test_metrics = vit.evaluate(test_tokens, test_Y_categorical)750/750 [==============================] - 52s 69ms/step - loss: 0.4441 - accuracy: 0.8418 - precision: 0.8573 - recall: 0.8228 - top-5-accuracy: 1.0000125/125 [==============================] - 9s 69ms/step - loss: 0.4731 - accuracy: 0.8315 - precision: 0.8466 - recall: 0.8140 - top-5-accuracy: 1.0000print('\nTraining set evaluation of ViT')for i, value in enumerate(train_metrics):print(metric_names[i], ': ', value)print('\nTest set evaluation of ViT')for i, value in enumerate(test_metrics):print(metric_names[i], ': ', value)Training set evaluation of ViTloss : 0.4440799057483673accuracy : 0.8418333530426025precision : 0.8573351502418518recall : 0.8227916955947876top-5-accuracy : 1.0
Test set evaluation of ViTloss : 0.47306209802627563accuracy : 0.8314999938011169precision : 0.8465938568115234recall : 0.8140000104904175top-5-accuracy : 1.0How To Make the ViT Faster
While there are several methods for making the ViT faster, we’ll implement the TokenLearner of Ryoo and colleagues. The TokenLearner layer learns to identify important tokens in the input data. It then dynamically selects these tokens conditioned on the input, reducing the number of tokens used for classifying images. This algorithm mimics the element-wise spatial self-attention.
What is the Basic TokenLearner Algorithm?
Here is the basic algorithm for the layer that implements the TokenLearner. In the algorithm below, n_maps represents the number of feature maps and is a user-supplied parameter.
- Compute weight maps conditioned on the inputs. The number of weight maps are n_maps. They effectively represent the attention weights. The weights have dimensions n_rows x n_cols x n_maps.
- Reshape the weights to total_tokens x n_maps.
- Multiply the weight maps by the inputs to get weighted inputs. The input size is total_tokens x embed_dim and the resulting weighted input size is total_tokens x n_maps x embed_dim.
- Apply spatial global average pooling to reduce the dimensions of the weighted inputs to n_maps x embed_dim.
Figure 2 shows all these computations on the left.
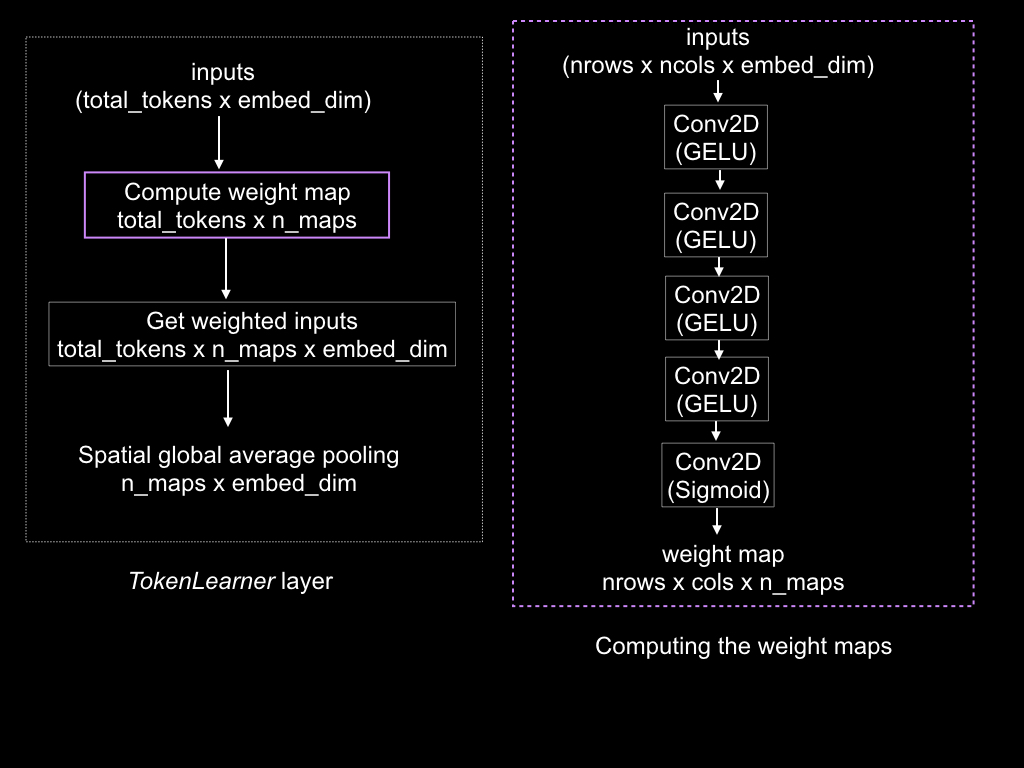
Figure 2: The token learning layer. Source: Mehreen Saeed
How Is the Weight Map Computed?
Ryoo and colleagues compute the weight map of the TokenLearner as follows:
- Reshape the inputs to n_rows x n_cols x embed_dim.
- Pass the inputs through a series of convolution layers with a Gaussian Error Linear Unit (GELU) activation function.
- Pass the convolved output through a convolution layer with sigmoid activation function. The dimensions of the result are n_rows x n_cols x n_maps.
The processing is shown on the right in Figure 2.
Where Is the Token Learner in the Transformer Network?
Ryoo and colleagues suggest you place the TokenLearner layer anywhere between the transformer encoder layers. They experimented with placing this layer at different points in the network. They observed that inserting the TokenLearner after the initial one quarter of the network reduces the computations to less than a third of the baseline with no compromise in accuracy. Moreover, if this layer is inserted further down in the network, the resulting model has improved accuracy.
Below is the code for the custom TokenLearningLayer. The fast_vit transformer model places the TokenLearningLayer after the two encoder layers, as shown in the figure below.
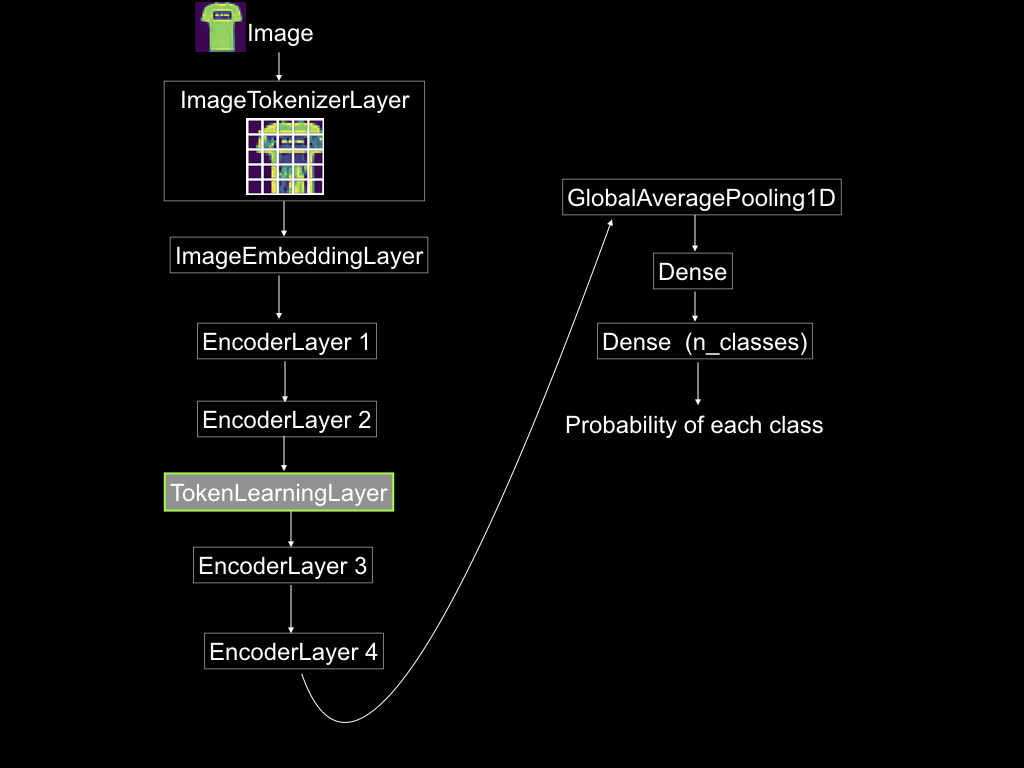
Figure 3: The overall ViT architecture with a token learning layer. Source: Mehreen Saeed
class TokenLearningLayer(Layer):def __init__(self, n_maps, token_dims):super(TokenLearningLayer, self).__init__()self.n_maps = n_mapsself.token_dims = token_dims
def build(self, input_shape):self.input_embed_dim = input_shape[-1]self.model = Sequential()# Add Reshape layer to make a nrowxncolxembed_dim shapeself.model.add(Reshape((self.token_dims[0],self.token_dims[1], self.input_embed_dim)))# Connect 4 Conv2D layersfor i in range(4):conv2D_layer = Conv2D(filters=self.n_maps, kernel_size=(3, 3),activation=gelu, padding="same",use_bias=False)self.model.add(conv2D_layer)# Connect with the last conv2D with sigmoid filterconv2D_sigmoid_layer = Conv2D(filters=self.n_maps, kernel_size=(3, 3),activation="sigmoid", padding="same",use_bias=False)self.model.add(conv2D_sigmoid_layer)# Reshape to (batch, nrow*ncol, n_maps)self.model.add(Reshape((-1, self.n_maps)))def call(self, inputs):total_tokens = inputs.shape[1]# attn_wts shape: (batch, row*col, n_maps)attn_wts = self.model(inputs)# Reshape inputs and attn_wts to match dimensions for multiplicationinputs = Reshape((total_tokens, 1, self.input_embed_dim))(inputs)attn_wts = Reshape((total_tokens, self.n_maps, 1))(attn_wts)# attended_output has shape (batch, row*col, n_maps, embed_dim)attended_output = inputs*attn_wts# Pool the result, will reduce one dimensionoutput = reduce_mean(attended_output, axis=1)return outputAfter creating the TokenLearningLayer, you can build the transformer with this layer after two encoder layers.
NMAPS=4def build_fast_vit(input_shape, embed_dim=EMBED_DIM,num_heads=NUM_HEADS, total_dense_units=TOTAL_DENSE,n_maps=NMAPS):# Start connecting layersinputs = Input(shape=train_tokens[0].shape)#tokenizer_layer = ImageTokenizerLayer(token_dims)(inputs)embedding_layer = ImageEmbeddingLayer(embed_dim)(inputs)encoder_layer1 = EncoderLayer(num_heads, total_dense_units, embed_dim)(embedding_layer)encoder_layer2 = EncoderLayer(num_heads, total_dense_units, embed_dim)(encoder_layer1)token_learning_layer = TokenLearningLayer(n_maps, (n_rows, n_cols))(encoder_layer2)encoder_layer3 = EncoderLayer(num_heads, total_dense_units, embed_dim)(token_learning_layer)encoder_layer4 = EncoderLayer(num_heads, total_dense_units, embed_dim)(encoder_layer3)pooling_layer = GlobalAveragePooling1D()(encoder_layer4)dense_layer = Dense(150, activation='relu')(pooling_layer)dropout_layer = Dropout(.5)(dense_layer)outputs = Dense(n_classes, activation="softmax")(dense_layer)# Construct the transformer modelfast_vit = Model(inputs=inputs, outputs=outputs)fast_vit.compile(optimizer="adam", loss="categorical_crossentropy",metrics=['accuracy', 'Precision', 'Recall',TopKCategoricalAccuracy(5, name="top-5-accuracy")])return fast_vit
fast_vit = build_fast_vit(train_tokens[0].shape)Next, let’s look at the summary of the model.
fast_vit.summary()Model: "model_1"_________________________________________________________________Layer (type) Output Shape Param #=================================================================input_2 (InputLayer) [(None, 5, 5, 25)] 0
image_embedding_layer_1 (Im (None, 25, 128) 6578ageEmbeddingLayer)
encoder_layer_4 (EncoderLay (None, 25, 128) 223972er)
encoder_layer_5 (EncoderLay (None, 25, 128) 223972er)
token_learning_layer (Token (None, 4, 128) 5184LearningLayer)
encoder_layer_6 (EncoderLay (None, 4, 128) 223972er)
encoder_layer_7 (EncoderLay (None, 4, 128) 223972er)
global_average_pooling1d_1 (None, 128) 0(GlobalAveragePooling1D)
dense_18 (Dense) (None, 150) 19350
dense_19 (Dense) (None, 4) 604
=================================================================Total params: 927,604Trainable params: 927,604Non-trainable params: 0_________________________________________________________________The summary of fast_vit model shows that the token_learning_layer takes a 25-by-128 input and reduces it to a 4-by-128 output. Hence, the subsequent encoder layers process 4-by-128 inputs—that is, four tokens instead of 25, thereby reducing the overall number of computations for training the ViT.
start_time = time.time()history_fast = fast_vit.fit(train_tokens, train_Y_categorical,batch_size=32, epochs=EPOCHS, validation_split=0.33)end_time = time.time()print('\nTime to train fast_vit', end_time-start_time)Epoch 1/6503/503 [==============================] - 75s 141ms/step - loss: 0.4245 - accuracy: 0.8503 - precision: 0.8667 - recall: 0.8332 - top-5-accuracy: 1.0000 - val_loss: 0.3101 - val_accuracy: 0.8900 - val_precision: 0.8996 - val_recall: 0.8827 - val_top-5-accuracy: 1.0000Epoch 2/6503/503 [==============================] - 71s 141ms/step - loss: 0.2782 - accuracy: 0.9082 - precision: 0.9179 - recall: 0.8992 - top-5-accuracy: 1.0000 - val_loss: 0.4236 - val_accuracy: 0.8811 - val_precision: 0.8955 - val_recall: 0.8662 - val_top-5-accuracy: 1.0000Epoch 3/6503/503 [==============================] - 72s 144ms/step - loss: 0.2576 - accuracy: 0.9143 - precision: 0.9254 - recall: 0.9040 - top-5-accuracy: 1.0000 - val_loss: 0.2209 - val_accuracy: 0.9256 - val_precision: 0.9344 - val_recall: 0.9188 - val_top-5-accuracy: 1.0000Epoch 4/6503/503 [==============================] - 72s 143ms/step - loss: 0.2317 - accuracy: 0.9247 - precision: 0.9346 - recall: 0.9150 - top-5-accuracy: 1.0000 - val_loss: 0.2241 - val_accuracy: 0.9270 - val_precision: 0.9319 - val_recall: 0.9225 - val_top-5-accuracy: 1.0000Epoch 5/6503/503 [==============================] - 72s 144ms/step - loss: 0.2223 - accuracy: 0.9261 - precision: 0.9364 - recall: 0.9170 - top-5-accuracy: 1.0000 - val_loss: 0.2157 - val_accuracy: 0.9265 - val_precision: 0.9389 - val_recall: 0.9150 - val_top-5-accuracy: 1.0000Epoch 6/6503/503 [==============================] - 73s 145ms/step - loss: 0.2232 - accuracy: 0.9258 - precision: 0.9352 - recall: 0.9175 - top-5-accuracy: 1.0000 - val_loss: 0.2151 - val_accuracy: 0.9251 - val_precision: 0.9351 - val_recall: 0.9173 - val_top-5-accuracy: 1.0000
Time to train fast_vit 436.3671143054962We can view the learning history of the fast ViT model.
metrics_fast = list(history_fast.history.values())fig = plt.figure(figsize=(18,4))for i in np.arange(n_metrics):fig.add_subplot(101 + n_metrics*10 +i)plt.plot(metrics_fast[i])plt.plot(metrics_fast[i+n_metrics])plt.legend(['Training', 'Validation'])plt.xlabel('Epoch Number')plt.ylabel(metric_names[i])
plt.gcf().suptitle('Learning history of ViT with token learning layer')plt.subplots_adjust(wspace=0.4)plt.show()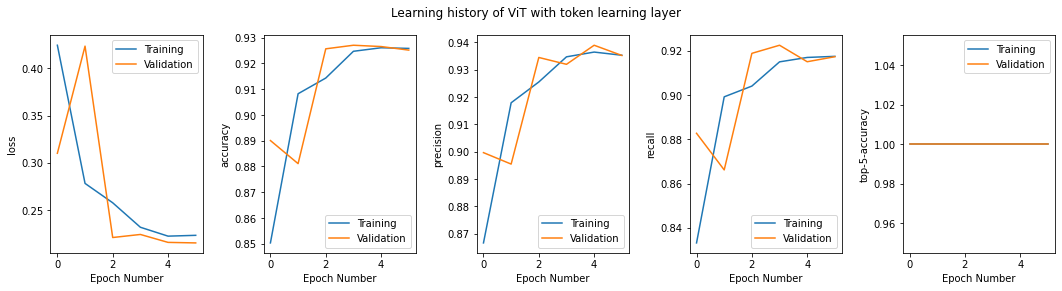
train_metrics_fast = fast_vit.evaluate(train_tokens, train_Y_categorical)
test_metrics_fast = fast_vit.evaluate(test_tokens, test_Y_categorical)750/750 [==============================] - 34s 44ms/step - loss: 0.1956 - accuracy: 0.9355 - precision: 0.9430 - recall: 0.9286 - top-5-accuracy: 1.0000125/125 [==============================] - 5s 42ms/step - loss: 0.2329 - accuracy: 0.9247 - precision: 0.9333 - recall: 0.9160 - top-5-accuracy: 1.0000print('\nTraining set evaluation of fast ViT')for i, value in enumerate(train_metrics_fast):print(metric_names[i], ': ', value)print('\nTest set evaluation of ViT')for i, value in enumerate(test_metrics_fast):print(metric_names[i], ': ', value)Training set evaluation of fast ViTloss : 0.19556963443756104accuracy : 0.9355416893959045precision : 0.9430433511734009recall : 0.9285833239555359top-5-accuracy : 1.0
Test set evaluation of ViTloss : 0.23290909826755524accuracy : 0.9247499704360962precision : 0.9332653880119324recall : 0.9160000085830688top-5-accuracy : 1.0What Do the Results Indicate?
Adding a TokenLearningLayer to the network reduces the number of parameters of the layers following it, which also reduces the training time. In this example, I have used the time class to estimate the CPU time for training both the ViT and the fast ViT models. The overall time and the ms/step are both less for the later model. While this may be a crude method to judge the running time of a function, it still gives us a pretty good idea of the reduction in overall computation time. You can use more sophisticated measures for profiling.
Also, if you run this multiple times, you’ll note that the accuracy of both models is about the same, if not better, for the fast ViT model in terms of the metrics.
For larger datasets with bigger images, you may have deeper networks. In this case, you would see a significant reduction in the number of variables involved and computation time.
What’s Next?
Now that you know how to build a TokenLearner layer, you can experiment with different transformer hyper-parameters including the number of encoder layers, number of heads used in the encoder layer, number of feature maps in the TokenLearner and the number of dense units. For larger datasets, you may want to add parameters to stabilize weight training during the training phase. If you want to add the TokenLearner again to the transformer, you’ll have to use it with a TokenFuser, which remaps the feature maps back to their original spatial dimension.
Learn More
Popular
Dive in
Related
Blog
How to Build a Transformer for Supervised Classification
By Mehreen Saeed • Jun 28th, 2022 • Views 25.2K
Video
How to Build an Effective AI Strategy for Business
By Catherine Williams • Oct 6th, 2021 • Views 4.5K
Blog
How to Build a Transformer for Supervised Classification
By Mehreen Saeed • Jun 28th, 2022 • Views 25.2K
Video
How to Build an Effective AI Strategy for Business
By Catherine Williams • Oct 6th, 2021 • Views 4.5K